
Eines der Ziele der Robotik ist es, dass Menschen und Maschinen in Zukunft enger, intelligenter und letztlich effizienter zusammenarbeiten. Dazu müssen die neuen „Soft-Roboter“ vor allem sicher sein. Ihre weiche und nachgiebige Struktur senkt das Risiko von Verletzungen und Unfällen drastisch, wenn sie mit Menschen oder empfindlichen Gegenständen in Kontakt kommen. Die Soft-Roboter sind geeignet für den Einsatz in allen Bereichen, in denen künftig eine engere Zusammenarbeit von Mensch und Roboter möglich sein wird, wie beispielsweise bei der medizinischen Rehabilitation und der Pflege.
Bereits in Gustav Meyrinks Roman „Golem“ von 1915 oder Karel Čapeks „Robot“ aus dem Jahr 1920, finden wir in der Fiktion des menschenähnlichen Helfers Inspiration für technische Innovationen. Auch der fiktive Held, Hiro Hamada aus dem Disney-Film „Baymax“ erlebt zahlreiche Abenteuer mit seinem persönlichen Gesundheitsbegleiter Baymax, einem freundlich aussehenden, ballonartigen, aufblasbaren Roboter. Es sind nun gut zehn Jahre vergangen, seit „Baymax“ in den Kinos gezeigt wurde, aber in seiner Aktualität und Voraussicht ist dieser Animationsfilm für mich immer ein großartiges Beispiel dafür, wie Vision zur Realität werden kann.
Mit Softrobotik flexibel und energieeffizient
Die Verwendung von flexiblen Materialien wie Silikon oder Elastomeren ermöglicht es Robotern, sich an komplexe Formen anzupassen und sich in ungleichmäßigen Umgebungen zu bewegen. Dies macht sie ideal für Anwendungen in engen Räumen oder in Situationen, in denen präzise Bewegungen erforderlich sind. Außerdem sind sie leichter als ihre starren Kollegen, da sie oft keine schweren Metallteile enthalten. Dies kann helfen, den Energieverbrauch zu reduzieren und die Effizienz zu steigern, insbesondere in Anwendungsbereichen, bei denen Mobilität eine große Rolle spielt.
Einführung in die Roboter-Mensch-Interaktion
Für eine erfolgreiche Zusammenarbeit zwischen einem Menschen und einem Roboter, einem sogenannten Co-Bot, ist die Sicherheit sehr wichtig. Ein Co-Bot muss über ein gewisses Maß an „Bewusstsein“ verfügen, um sicher mit seinem menschlichen Partner zu kooperieren. Insbesondere bei der Interaktion mit Menschen ist es entscheidend, dass der Roboter präzise Bewegungen mit genau kalibrierter Kraft ausführt. In diesem Zusammenhang ist die Fähigkeit, Berührungen auf seiner Oberfläche zu spüren von großem Vorteil.

Noch besser ist es, wenn der Roboter ein Bewusstsein für Objekte in seiner unmittelbaren Umgebung entwickelt. Aktuelle Technologien für Co-Bots setzen häufig auf Kameraunterstützung. Die aufgenommenen Bilder werden mit Hilfe von Bilderkennungstechnologien verarbeitet. Dieser Ansatz hat jedoch seine Tücken, wenn Objekte das Sichtfeld der Kamera behindern. Daher verwenden einige moderne Co-Bots andere Arten von Sensoren, z. B. druckempfindliche taktile Hüllen oder Häute.
Sichere Koordination in der Umgebung durch Kapazitive Sensorik
Eine weitere Möglichkeit, Co-Bots ein Bewusstsein für ihre Umgebung zu geben, sind kapazitive Näherungssensoren. Die kapazitive Sensorik nutzt die Wechselwirkung der elektrischen Felder des Sensors mit Objekten in der Nähe. Diese Sensormethode kann bei verschiedenen Materialien über kurze Entfernungen eingesetzt werden. Menschliche Körper mit ihrem hohen Wassergehalt können mit dieser Methode recht gut erkannt werden. Der kapazitive Näherungssensor benötigt keine direkte Sichtlinie und ist daher besonders für beengte Räume geeignet, in denen Kameras nur schwer eingesetzt werden können. Im Gegensatz zu einem Kraft- oder Berührungssensor hat dies auch den Vorteil, dass ein Roboter seine Bewegungsbahn ändern kann, bevor es zu einem potenziell schädlichen Kontakt kommt.

Am Fraunhofer IPA haben wir den Einsatz kapazitiver Sensoren an einem Roboter in einem gemeinsamen Projekt mit Industriepartnern demonstriert. Der Anwendungsfall war ein Roboter für die Montage von Schützen auf der Stromschiene in einem Schaltschrank.
Die Durchführung dieser Aufgabe mit Kameras ist aufgrund des dunklen und beengten Raums im Schaltschrank nicht einfach. Hierfür wurde ein Industrieroboter mit kapazitiven Sensoren modifiziert. Die aufgebrachten Sensorpads sind leitfähige Schaltungen, die direkt auf Polymerfolien gedruckt sind. Diese Folien haben den Vorteil, dass sie dünn und leicht sind und direkt auf den Roboter geklebt werden können. In der Abbildung ist der Roboter mit den aufgebrachten Sensorpads dargestellt. Für verschiedene Teile des Roboters wurden unterschiedliche Sensorformen gewählt, um der Geometrie des Roboters gerecht zu werden.
AIST und IPA entwickeln gemeinsam die Soft-Robotik weiter
Die Vernetzung von physischen Geräten und Gegenstände über das Internet wird als Internet der Dinge (IoT) bezeichnet und dient dazu, selbstständig Daten zu sammeln, auszutauschen und zu verarbeiten. In einer zukünftigen IoT-Gesellschaft wären Soft-Roboter, ideal für die körpernahe Kooperation mit dem Menschen geeignet. Doch wie kann das im Einzelnen aussehen?
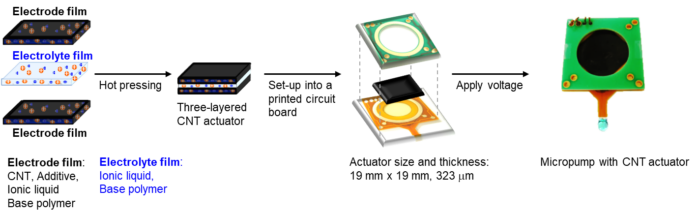
Aktuatoren aus elektroaktiven Polymeren (EAP), die durch elektrische Spannungen verformbar sind, haben beispielsweise das Potenzial, als Energiequelle für weiche Roboter zu dienen. Wir vom IPA und AIST haben gemeinsam eine Mikropumpe entwickelt, die auf einem ionischen EAP-Aktuator basiert, der aus Kohlenstoff-Nanoröhren (CNT), ionischen Flüssigkeiten und Polymeren besteht. Diese CNT-Aktuatoren haben eine dreischichtige Struktur, die kapazitive Eigenschaften aufweist und bei niedrigen Spannungen unter 3 V eine Biegeverformung zeigt. Wenn die CNT-Aktuatoren in eine Leiterplatte eingesetzt werden, bewegen sie sich bei angelegten Spannungen wie eine Membranpumpe auf und ab.
Anwendung in der Medizin und als Bedienungshilfe
Diese mit niedriger Spannung betriebene Mikropumpe kann beim Anlegen einer Spannung etwa 10 Mikroliter Flüssigkeit in wenigen Sekunden pumpen und soll im Vergleich zu herkömmlichen keramischen Piezopumpen als leichtere Infusionspumpe eingesetzt werden. Hierbei haben die spezifischen Eigenschaften von EAP’s einen immensen Vorteil gegenüber etablierten Technologien. EAP Aktuatoren sind leicht, weich und flexibel, menschlichen Organen und Gewebe ähnlich. Aus diesem Grund ist im Falle einer invasiven Anwendung, ein wesentlich angenehmere Nutzung zu erwarten. Wir vom AIST haben mit der CNT-Mikropumpe auch einen handlichen Prototyp für ein medizinisches Diagnosegerät am Point-of-Care (POC) entwickelt.
Die Biegeverformung von CNT-Aktuatoren macht sich auch, die von AIST entwickelte, aktualisierbare Braille-Anzeige zunutze. Wenn Spannung an die dreilagigen CNT-Aktuatoren angelegt wird, bewegen die CNT-Aktuatoren die Braille-Stifte nach oben und unten. Der Prototyp ist leicht und dünn, 65 mm (Breite) x 30 mm (Tiefe) x 3~5 mm (Dicke), und kann sechs Braille-Zeichen anzeigen. Diese leichte und dünne Braillezeile ist für sehbehinderte Menschen deshalb so praktisch, weil sie diese wie ein Mobiltelefon benutzen können.
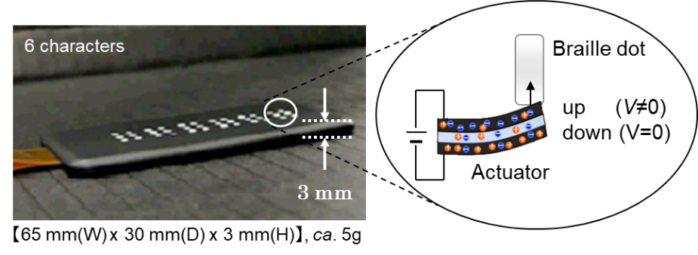
Quelle: AIST
In naher Zukunft planen wir, durch die internationale Zusammenarbeit zwischen AIST und Fraunhofer IPA die Entwicklung von weichen Aktuatoren und weichen Sensoren weiter zu verstärken, die für die Soft-Robotik unerlässlich sind.
Haben wir Ihr Interesse geweckt? Am 18. September 2024 findet für Interessierte eine EAP-Update-Session mit dem Titel „Get, set, go for Electroactive Polymers“ in digitalem Format statt. Gemeinsam mit dem japanischen Nanomaterials Research Institute, Department of Materials and Chemistry, National Institute of Advanced Industrial Science and Technology bringen wir die Teilnehmenden auf den aktuellen Stand der Technik und stellen Entwicklungsstrategien und Anwendungsbeispiele vor. Bei der Registrierung zur Online-Session besteht die Möglichkeit, einen individuellen Dialogue-Slot mit den EAP-Experten zu buchen. In einem 30-minütigen Zeitfenster steht das Team in einem geschützten Rahmen exklusiv für Fragen, Use Cases, Chancen und Herausforderung rund um die Kommerzialisierung von EAPs zur Verfügung. Die Experten-Dialogues finden ebenfalls online via TEAMS statt. Nutzen Sie diese einmalige Gelegenheit des bilateralen Austauschs mit herausragenden Forschenden auf dem Gebiet der elektroaktiven Polymere. Melden Sie sich jetzt schon zur Update-Session EAP an und sichern Sie sich einen individuellen Dialogue-Slot! Zur Anmeldung.
Selbstverständlich können Sie sich auch in der Zwischenzeit, jederzeit bei Fragen und Anregungen an Ivica Kolarić wenden.
Contributing partners & authors
Takushi Sugino Hirosato Monobe

